


คำอธิบายของ QGroundControl (Daily Test Build)
IMPORTANT: This version of QGroundControl is the daily testing version. It may not be as stable as the supported Stable version. It has all the latest features which are being added daily by the QGroundControl development team. This version should be sued with caution.
QGroundControl provides full flight control and configuration for ArduPilot or PX4 Pro powered vehicles. The goal for QGroundControl is improved ease of use for new users as well as high end feature support for experienced users.
QGroundControl features:
- Full configuration support for vehicles running PX4 Pro and ArduPilot (ArduCopter, ArduPlane, ArduRover, ArduSub ) firmware
- Mission planning for autonomous flight
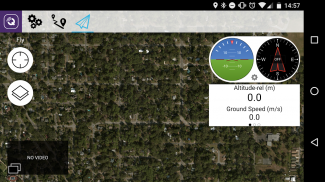
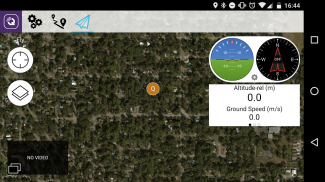
- Flight map display showing vehicle position, flight track, waypoints and vehicle instruments
- Video streaming with instrument display overlays
- Flight support for any MAVLink capable vehicle
QGroundControl is also available for Windows, MacOS, Linux and iOS.
Release Notes
QGroundControl Official Site
Documentation
Support
สำคัญ: QGroundControl รุ่นนี้เป็นรุ่นทดสอบรายวัน อาจไม่เสถียรเท่ากับรุ่น Stable ที่รองรับ มันมีคุณสมบัติล่าสุดทั้งหมดที่ถูกเพิ่มเข้ามาทุกวันโดยทีมพัฒนา QGroundControl รุ่นนี้ควรถูกฟ้องด้วยความระมัดระวัง
QGroundControl ให้การควบคุมการบินและการกำหนดค่าเต็มรูปแบบสำหรับยานพาหนะขับเคลื่อน ArduPilot หรือ PX4 Pro เป้าหมายของ QGroundControl ได้รับการปรับปรุงให้ง่ายต่อการใช้งานสำหรับผู้ใช้ใหม่รวมถึงการสนับสนุนฟีเจอร์ระดับสูงสำหรับผู้ใช้ที่มีประสบการณ์
คุณสมบัติ QGroundControl:
- รองรับการกำหนดค่าเต็มรูปแบบสำหรับยานพาหนะที่ใช้ PX4 Pro และ ArduPilot (ArduCopter, ArduPlane, ArduRover, ArduSub)
- การวางแผนภารกิจสำหรับการบินด้วยตนเอง
- จอแสดงผลแผนที่เที่ยวบินแสดงตำแหน่งของยานพาหนะติดตามเที่ยวบินจุดอ้างอิงและเครื่องมือยานพาหนะ
- การสตรีมวิดีโอพร้อมการซ้อนทับจอแสดงผลเครื่องมือ
- รองรับเที่ยวบินสำหรับยานพาหนะที่มีความสามารถ MAVLink
QGroundControl ยังมีให้ใน Windows, MacOS, Linux และ iOS
บันทึกประจำรุ่น
เว็บไซต์ทางการของ QGroundControl
เอกสารประกอบ
การสนับสนุน
QGroundControl (Daily Test Build)--เวอร์ชั่น4.1.0-8-g246d5742b
(18-01-2021)QGroundControl (Daily Test Build) - ข้อมูล APK
เวอร์ชั่น APK: 4.1.0-8-g246d5742bแพ็คเกจ: org.mavlink.qgroundcontrolbetaเวอร์ชั่นล่าสุดของQGroundControl (Daily Test Build)
แอปในประเภทเดียวกัน
คุณอาจจะชอบ...






